Симулятор для беспилотников разработали в университете Иннополиса
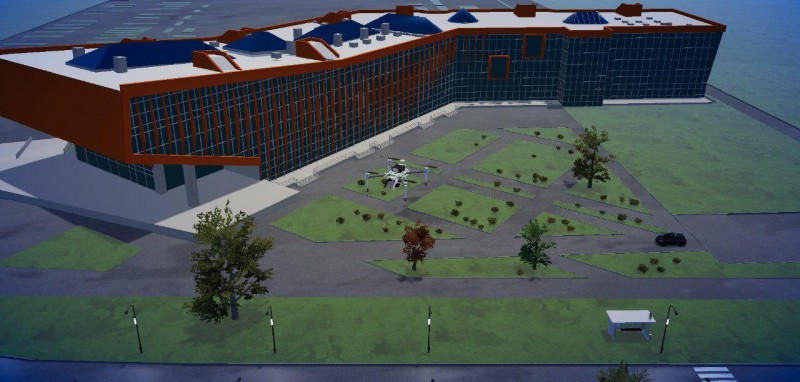
Innopolis Simulator для автономных подвижных объектов, созданный на основе технологии Unity 3D, сделает устройства дешевле и безопаснее. Презентация проекта российского IT-вуза пройдёт 15 октября.
Авторы программного комплекса для отладки и моделирования поведения автономными подвижными объектами в симуляторе — научные сотрудники Центра технологий компонентов робототехники и мехатроники Университета «Иннополис». Он в свою очередь является Центром компетенций Национальной технологической инициативы (НТИ). С помощью новинки разработчики беспилотных средств смогут избежать критических ошибок проектирования, исправить их на ранних этапах и сэкономить на натурных испытаниях.
Innopolis Simulator отрабатывает различные сценарии на дороге, имитирует движение трафика и пешеходов и их обнаружение, моделирует все необходимые датчики и сенсоры — радар, лидар, камеры, GPS, IMU. В программном комплексе реализованы модули ground truth, которые определяют точное расположение объектов в пространстве, уточняют в пресс-службе Российской венчурной компании (РВК).
По словам инженера-исследователя лаборатории автономных транспортных средств Сергея Копылова, сейчас для тестов реальной машины требуется 2-3 человека, им приходится делать много проездов на реальной площадке. Симулятор позволяет проводить эксперимент без выхода на улицу с участием одного специалиста.
Ученые также разработали модули картографирования и динамической загрузки карт в реальном времени. Решение дает возможность преобразования координат из разных систем и создания дорожного полотна.
По сравнению с аналогами, у симулятора Центра компетенций НТИ есть 10 уникальных параметров:
- гибкое конфигурирование каждого датчика,
- снятие датасетов,
- разработка уникальных сценариев,
- поддержка разнообразных моделей подвижных объектов,
- модуль картографирования, геокодинга и процедурного генерирования поверхности и объектов в зависимости от положения автомобиля,
- модуль создания и экспорта HD карт,
- модуль управления временем суток и погодными эффектами,
- модуль аналитики,
- модуль редактирования контента сцены на время выполнения.
Разработка виртуальной среды для моделирования движения роботизированного городского автомобиля сократит стоимость его процесса разработки, отметил руководитель Центра технологий компонентов робототехники и мехатроники Александр Климчик. С помощью симулятора повысится уровень безопасности автомобиля во время движения в реальной городской среде», добавил он.